




Transmisores inerciales, lineales, aceleración-impacto, inclinación
Transmisores de movimientos con tecnología de estado sólido MEMS Honeywell
Características Generales
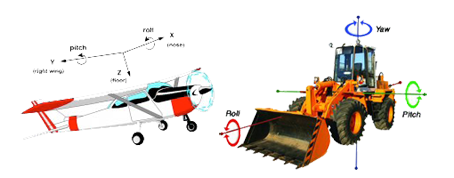
- Sensor inercial para la toma de datos de giro y aceleración de los ejes X, Y, Z, basado en la tecnología MEMS (micro electromechanical machine sensors), ampliamente utilizada en industria aeroespacial y equipos de navegación aérea (giróscopos) que operan bajo el principio del efecto Coriolis
- Este equipo proporciona información dimensional (3D) de los cambios de giro/rotación y aceleración que se producen en el movimiento de un equipo. Es decir, 3 sentidos de giro y 3 valores de aceleración (longitudinal, vertical y lateral)
- Especialmente diseñado para mejorar la seguridad, estabilidad, productividad y conseguir el máximo rendimiento en vehículos industriales, maquinaria agrícola, maquinaria para la construcción, vehículos especiales y equipos de elevación
Especificaciones
- Control en tiempo real gracias a su microprocesador y sistema de comunicación basado en un BUS de alta velocidad tipo CAN (2.0A/2.0B 500kB) a 1Mbit/s
- Frecuencia de muestreo (100Hz) cada 10msec
- Vibración: 3,1g RMS (10Hz a 2000Hz) max.
- Resolución movimiento de rotación: 0,046º/s
- Aceleración: +/-17m/s2
- Resolución de la aceleración: 0,04785m/s2
Aplicaciones






Circuitos de elevación
Control de avalanchas
Protección geológica
Monitorización de taludes
Lineas de Productos
Inclinómetros Datalogger LoRa - Transmisores Inerciales

Control en tiempo real gracias a su microprocesador y sistema de comunicación basado en un BUS de alta velocidad tipo CAN (2.0A/2.0B 500kB) a 1Mbit/s. Frecuencia de muestreo (100Hz) cada 10msec. Vibración: 3,1g RMS (10Hz a 2000Hz) max. Resolución movimiento de rotación: 0,046º/s. Aceleración: +/-17m/s2. Resolución de la aceleración: 0,04785m/s2.

Control en tiempo real gracias a su microprocesador y sistema de comunicación basado en un BUS de alta velocidad tipo CAN (2.0A/2.0B 500kB) a 1Mbit/s. Frecuencia de muestreo (100Hz) cada 10msec. Vibración: 3,1g RMS (10Hz a 2000Hz) max. Resolución movimiento de rotación: 0,046º/s. Aceleración: +/-17m/s2. Resolución de la aceleración: 0,04785m/s2.

El sensor TARS-IMU es una matriz de sensores compacta diseñada para informar sobre los ángulos existentes en un vehículo en marcha, velocidad, aceleración e inclinación para aplicaciones exigentes y vehículos especiales fuera de carretera. TARS-IMU permite a los vehículos total autonomía mejorando la eficiencia y la productividad al informar de datos clave requeridos para automatizar y monitorear los movimientos del vehículo sistemas y componentes. Alimentación a 5V ó 9-36Vcc. Comunicación tipo CAN J1939 (estándar a nivel industrial). TARS-IMU está calibrado bajo los estándares aeroespaciales.


Transmisor - Datalogger vertical u horizontal, de tipo biaxial y tecnología MEMS. Con batería interna del litio y esperanza de vida @ de 5 años, con frecuencia de latido cada 60 minutos. Grado de protección IP65. Dispone de 4 canales, rango 1-15° (resolución 0,0002°), incluye posibilidad de medida de distancia (sensor laser integrado) y temperatura. Capacidad de almacenamiento de hasta 64000 muestras y opción de descarga mediante puerto USB. Los módulos repetidores de la señal de radio pueden extender y multiplicar su radio de cobertura hasta 16X.

Registrador de datos con 4 canales para la lectura de los parámetros, deformación lineal por cable (hasta 4,8 m), aceleración máxima (impacto) e inclinación biaxial, con función datalogger integrada. Acelerómetro de tres ejes MEMS que permite controlar los valores de aceleración máxima e inclinación. Alimentación por baterías y panel fotovoltaico externo para ubicación en campo. Nivel de estanqueidad: IP67
subscríbete a nuestras newsletters
Contáctanos
08297 Castellgalí
Barcelona (España)
Telèfon: +34 93 833 44 49
Fax: +34 93 833 36 68
Email: info@sensorstecnics.net
Copyright © Sensorstecnics & Semiconductors. Todos los derechos reservados.
Aviso legal
Política de privacidad
Cookies
Accesibilidad
Créditos